

robotics-university.com | Hello my friends, I hope my articles about EPSON Robot are useful for you. Today I will continue guide you learning about EPSON robot motion control. In this article, we will learn how to jog (moving) EPSON robot manually.
Before you start to jog the EPSON robot on simulator environment, you have to do three steps below, i.e.
1. OPEN EPSON ROBOT SIMULATOR
Read my guidance how to open EPSON robot simulator, on my previous article here!
2. OPEN EPSON ROBOT MANAGER
Read my guidance how to open EPSON Robot Manager, on my previous article here!
3. TURN EPSON ROBOT MOTORS ON
Read my guidance how to turn EPSON robot motor ON, on my previous article here!
For you information, to jog or to move a robot joint, there is two method can use. First, you can use joint jog button that available on the Jog & Teach tab. Second, you can jog a robot joint directly using your mouse-cursor.
4. JOG THE EPSON ROBOT USING JOG & TEACH TAB FEATURE
On this section, I will guide you to do the first method. To start jogging a robot joint with the first method. First, click “Jog & Teach” tab on the Robot Manager. See figure 1!

Figure 1. Robot Manager Windows - Jog & Teach tab
Then set some jogging parameters. On “the jogging section,” select the jogging mode and jogging speed! On the “Current Position” section, there are three option, i.e. World, Joint, and Pulse, select “joint”! Then on the “Jog Distance” section, there are four option, i.e. Continuous, Long, Medium, and Short, select “Continuous”! See figure 2!

Figure 2. Robot Manager Windows - Jog & Teach (Mode, Speed, Position) setting
If the jogging setup has been set, then you can start the robot joint jogged by click the joint control button. See figure 3!

Figure 3. Robot Manager Windows - Jog & Teach button (J1, J2, J3, J4, J5, J6)
Click +J1 button or -J1 button to control the joint-1 of the robot. Use +J1 button to move the joint-1 of the robot to the positive direction and use -J1 button to move the joint-1 of the robot to negative (opposite) direction. This explanation be valid for joint-2, joint-3, joint-4, joint-5, and joint-6 too.

Figure 4. Robot Simulator Windows - Robot position has been change after jogged
When you jog a robot joint, you can see the robot joint moving on the Robot Simulator. So you can see and make the robot moving to your wanted position. See figure 4!
5. JOG THE EPSON ROBOT USING MOUSE-CURSOR
The second method to jog a robot joint is using mouse-cursor. With mouse-cursor, you can jog the robot joint directly on the robot simulation environment. To start jogging a robot joint using mouse-cursor. First, make sure that the Robot Simulator has been opened. If the Robot simulator hasn’t opened, you can open it with follow the step how to open the Robot Simulator by see step 1 above.

Figure 5. Robot Simulator Windows
If the Robot Simulator has been opened, next, click “Object Rotation/Robot Jog” button on the Robot Simulator windows. See figure 6!

Figure 6. “Object Rotation/Robot Jog” button on the Robot Simulator windows
After the “Object Rotation/Robot Jog” button clicked, to start jog a robot joint, you only need to lay your mouse-cursor to a part of the robot joint. If your mouse-cursor has already on the right position of the robot joint, so the colour of the robot joint will be change from white to blue. See figure 7 until figure 13!

Figure 7. Robot Simulator - the Robot base colour become blue

Figure 8. Robot Simulator - Joint #1 of the Six-axis EPSON Robot

Figure 9. Robot Simulator - Joint #2 of the Six-axis EPSON Robot

Figure 10. Robot Simulator - Joint #3 of the Six-axis EPSON Robot

Figure 11. Robot Simulator - Joint #4 of the Six-axis EPSON Robot

Figure 12. Robot Simulator - Joint #5 of the Six-axis EPSON Robot
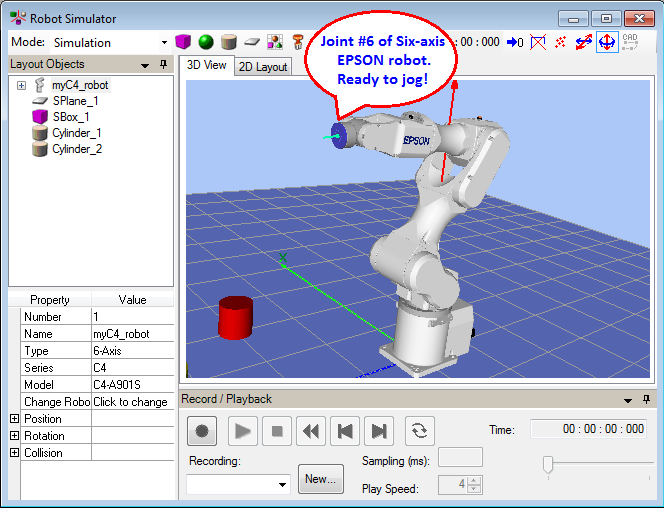
Figure 13. Robot Simulator - Joint #6 of the Six-axis EPSON Robot
To jog a robot joint, left-click and hold the joint and then shift your mouse-cursor with follow the joint rotate direction.
0 comments:
Post a Comment